




XV 1
A dedicated rear-view camera exclusively for viewing, enhanced convenience with an external switch.


A dedicated rear-view camera exclusively for viewing, enhanced convenience with an external switch.
Unobstructed view in any condition
Unlike regular rear cameras that only capture the ground, the XV1 ensures safe driving by awaring approaching vehicles and pedestrians from a distance by 180° wide-angle view.

Perfectly equipped with
Thanks to VUEROID’s exclusive ISP tuning technology, crystal-clear image quality is ensured at all times, whether it’s day or night.



Superior compatibility
The XV1 supports compatibility with most monitors available on the market.
*NOTE: A monitor should be supported with CVBS, AHD or HDTVI ports.

Based on Driving Environment
The XV1 FHD offers four view modes, enabling drivers to choose the most suitable one for any driving environment by a button.

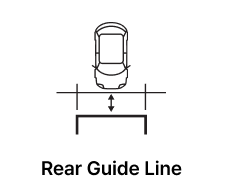
Safe Driving Guide
Drivers can estimate the actual distance between their vehicle and others behind them using pre-set lines customized for their specific vehicle. Safe Driving Guide, which includes distance markers and collision prevention lines, significantly improves situational awareness and overall safety.

*The above components are subject to change depending on parts supply.
(The above image is for consumer reference and may differ from the actual product.)
| Camera Sensor | SONY STARVIS(IMX307) |
| Viewing Angle | (D)180°×(H)180°×(V)115.2° |
| View Mode | Original / Drive / Rear / Top |
| Viewing Tx | AHD/ HD-TVI/ CVBS(NTSC/ PAL) |
| Dimention/ Weight | 42.4×30×42.9mm / 120g |
| Power Input | DC 24V / 0.45A (AVG) |
| Operation Tempertature | -20℃ ~ 60℃ ( -4℉ ~ 158℉) |

The distortion caused by the structural design of wide-angle lenses can lead to side effects such as a loss of depth perception. By applying VUEROID CV’s exclusive LDC technology, video distortion caused by lens characteristics is minimized.


Original View

During parking or reversing, it helps to check the surroundings behind the vehicle, starting from the bumper.

During driving, it helps to quick check the situation of rear by showed similarly to the driver’s field of view.

During parking, it helps to adjust the parking position precisely by intuitively checking the distance.

With a total of three guidelines, it is recommended to set two lines based on the vehicle’s overall length, while the remaining one is set by the driver at a point where potential accidents may occur.